LinuxでAVR
ファームを更新した中華USBaspを使ってLinuxでAVRの書込みできました。
作ったのは、hello world的な簡単なコード。
母艦環境はArch Linux。
先日の記事に書いたが、
母艦にインストールしたのはavrdude,avr-gcc,avr-binutils,avr-libcの4パッケージで全部公式リポジトリにある。
avr-gccでC言語のコードをAVR用にコンパイルして、avr-binutilsに含まれるavr-objcopyコマンドでavrdudeで書き込めるihex形式のファイルに変換する。
今回のコード。
main.c
文字出力のできないマイコンの入門には出力確認としてLEDを光らせる。
AVR入門のコードではLEDを点滅させるコードが多いと思うのだが、入門用プログラムにはタイマーを使った"点滅"などさせずに"点灯"だけの方が良いんじゃないかと思う。
が、固定で電圧を出力するだけだとマイコンの処理結果で電圧が出てるのかわからないので、特定ピンの入力状態によって対応ピンに出力するコードにした。
今回使ったAVRはDIPパッケージのATtiny2313で、
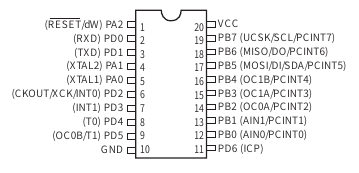
ピン配列はこのようになってる。
20ピンのうち、20番のVCCと10番のGNDはマイコン電圧用なので入出力には利用できない。
A,B,Dの3グループ(ピン数の多いマイコンではCグループもある)に分けられており、
PA0-2 = 3本
PB0-7 = 8本
PD0-6 = 7本
が入出力用に利用できる。
このうち、PA2,PB7,PB6,PB5の4本はマイコンへのファームウェア読み書き用に使わず空けておきたい。
PDは全部使えるので、PB0-6の入力がhighなら対応する番号のPD0-6の出力をhighにするプログラムにした。
今回のコードの、
DDR[A,B,D]に値を設定するとピンを入力用にするか出力用にするかを切り替えられるが、
値を2進表記(0bから始まる数値)するとわかりやすい。
2進表記時の最下位ビットが各グループの0番ピン。
対応位置が0なら入力用で、1なら出力用になる。
PB0-7の8本は全部入力用にして、PDは0-6番の7本なので最上位を0にして桁合わせした。普通の10進数と同じで最上位が0なら無意味。
状態の変化に応じてLEDを切り替えるために無限ループにした。
PORTDはPDの出力で、PINBはPBの入力状態。
PDにPBの状態をそのまま代入したが、特定ピンを対象にコードを書きたいならDDR[A,B,D]と同じで2進表記するとわかりやすい。
で、回路の方。
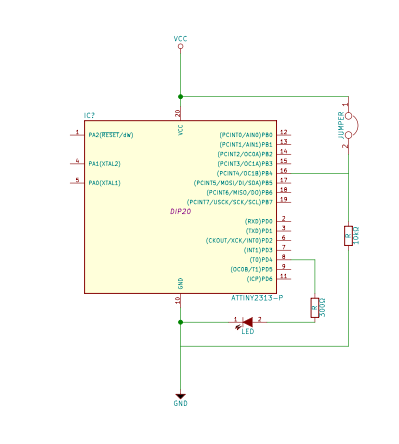
PDグループのピンの出力を同じ番号のPBグループピンの入力状態に対応させるプログラムなわけだが、
マイコンのピン配列的にやりやすそうに見えた4番ピンだけを使うようにした。
まず、PD4にLEDを繋いで、電流制限のために300Ωの抵抗を入れた。
PD4に対応するPB4に電圧をかけるわけだが、PB4と電源との間にON/OFFできるスイッチとしてジャンパを入れた。
そして、PB4は大きい抵抗を挟んでGNDに繋いだ。
PB4をGNDに繋がない場合、スイッチONなら電源電圧がかかるので入力状態がhighだが、スイッチOFFで電源と断線している時にどことも繋がっていないので電位が不明。
スイッチOFF時に確実にlow(0V)にするためにPB4はGNDと繋ぐ。
PB4とGNDを直結してしまうとスイッチON時に電源からGNDにショートしてしまい大電流が流れてしまうので、スイッチとなるジャンパとGNDの間に大きい抵抗を入れる。
この時の抵抗がプルダウン抵抗という。
コードと回路が出来上がったわけだが、avr-gccでコンパイル。
-mmcuオプションでターゲットマイコンの種別を指定する。
-cオプションでコンパイルされる。
-Oオプションで最適化ができるのだが、-Osだとサイズが小さくなるように最適化される。
-Osつけた場合とつけなかった場合で、今回のコードだけでも.hexファイルに140byteと50byteくらいの違いが出る。
gccの出力したmain.oを、avr-objcopyコマンドでavrdudeで書き込めるihex形式に変換する。
-Oオプションで出力ファイル形式。
オプションに続けて入力ファイルと出力ファイル名。
gccの出力したmain.oはelf32-avrという形式らしい。
avrdudeコマンドでマイコンのflash領域に書き込み。
-Bの値は大きい方が遅いぽい。
<実験>
OFF状態
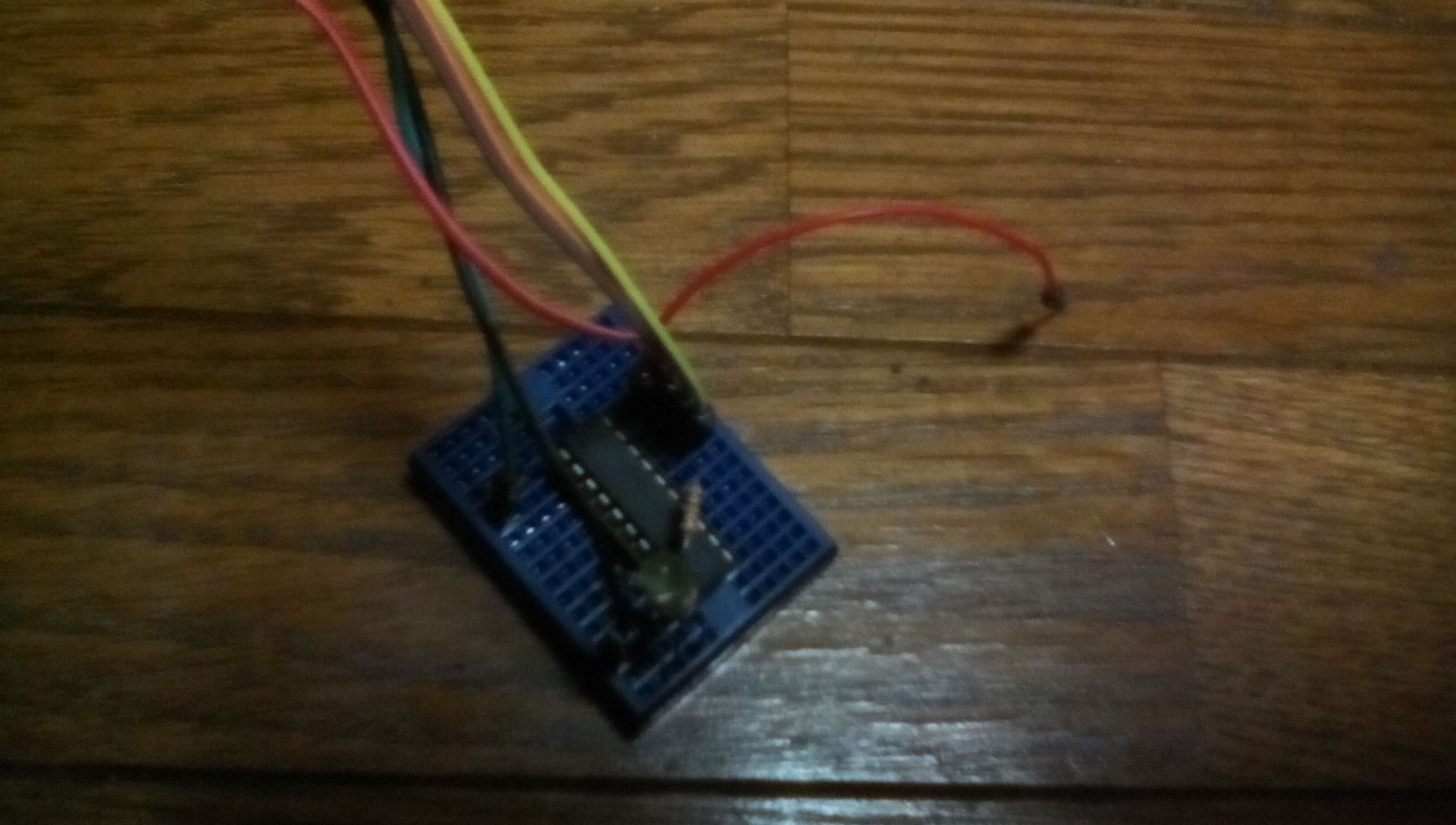
回路図記載のPB4とPD4以外に、PA2,PB5,PB6,PB7に線が繋がってるが、USBaspと繋いだままなので。
VCC(5V)とGND(0V)もUSBaspと繋いだままで、そこからマイコンに給電。
赤いケーブルが1個抜けてるが、これがジャンパでスイッチOFF状態。
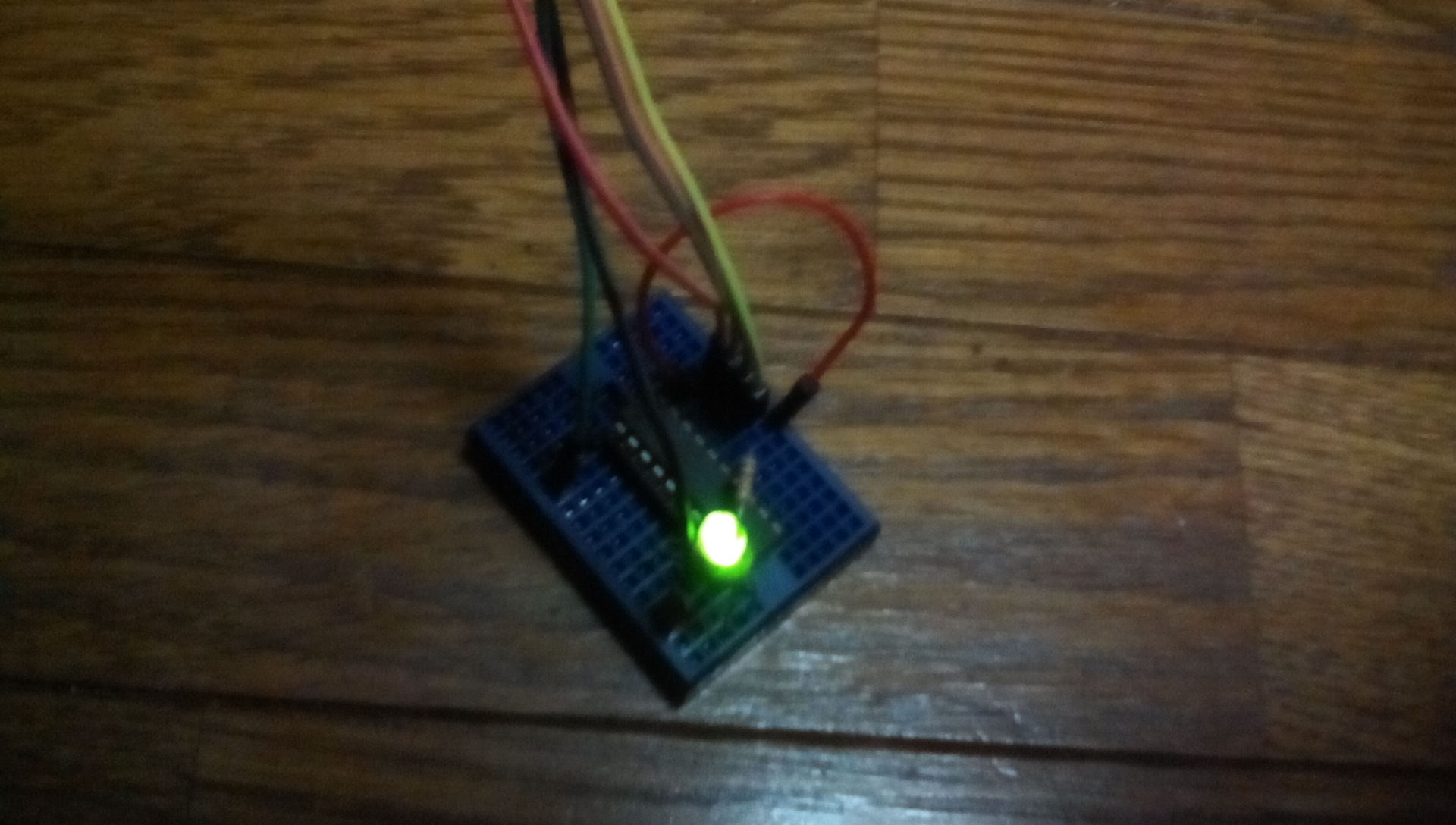
ジャンパをPB4につないだらPD4に繋いだLEDが光った!
というわけで実験成功。
こんなLED光らせるだけのプログラムでは全く実用性がないが、
USB接続のPC用デバイスを自作したり、PCから制御できる特殊デバイスを作る技術を得るために、
クリスタルが届いたらV-USB系の実験をやろうと思ってる。
あと、USBの通信は不要で実用的なものとして、USB電源でのニッケル水素充電と、
先日届いたステップアップDCコンバータでニッケル水素電源での5V(USB)出力の制作を考えてる。
作ったのは、hello world的な簡単なコード。
母艦環境はArch Linux。
先日の記事に書いたが、
母艦にインストールしたのはavrdude,avr-gcc,avr-binutils,avr-libcの4パッケージで全部公式リポジトリにある。
avr-gccでC言語のコードをAVR用にコンパイルして、avr-binutilsに含まれるavr-objcopyコマンドでavrdudeで書き込めるihex形式のファイルに変換する。
今回のコード。
main.c
#include <avr/io.h>
int main(){
DDRB=0b00000000;
DDRD=0b01111111;
while(1){
PORTD=PINB;
}
}
PC用プログラミングの"hello world"ではその名の通り"hello world"と文字を出力するのが一般的だが、int main(){
DDRB=0b00000000;
DDRD=0b01111111;
while(1){
PORTD=PINB;
}
}
文字出力のできないマイコンの入門には出力確認としてLEDを光らせる。
AVR入門のコードではLEDを点滅させるコードが多いと思うのだが、入門用プログラムにはタイマーを使った"点滅"などさせずに"点灯"だけの方が良いんじゃないかと思う。
が、固定で電圧を出力するだけだとマイコンの処理結果で電圧が出てるのかわからないので、特定ピンの入力状態によって対応ピンに出力するコードにした。
#include <avr/io.h>
は、IOピン関連のライブラリをインクルード。今回使ったAVRはDIPパッケージのATtiny2313で、
ピン配列はこのようになってる。
20ピンのうち、20番のVCCと10番のGNDはマイコン電圧用なので入出力には利用できない。
A,B,Dの3グループ(ピン数の多いマイコンではCグループもある)に分けられており、
PA0-2 = 3本
PB0-7 = 8本
PD0-6 = 7本
が入出力用に利用できる。
このうち、PA2,PB7,PB6,PB5の4本はマイコンへのファームウェア読み書き用に使わず空けておきたい。
PDは全部使えるので、PB0-6の入力がhighなら対応する番号のPD0-6の出力をhighにするプログラムにした。
今回のコードの、
DDRB=0b00000000;
DDRD=0b01111111;
は、ピンを入力用にするか出力用にするかの設定。DDRD=0b01111111;
DDR[A,B,D]に値を設定するとピンを入力用にするか出力用にするかを切り替えられるが、
値を2進表記(0bから始まる数値)するとわかりやすい。
2進表記時の最下位ビットが各グループの0番ピン。
対応位置が0なら入力用で、1なら出力用になる。
PB0-7の8本は全部入力用にして、PDは0-6番の7本なので最上位を0にして桁合わせした。普通の10進数と同じで最上位が0なら無意味。
while(1){
PORTD=PINB;
}
の部分は、PORTD=PINB;
}
状態の変化に応じてLEDを切り替えるために無限ループにした。
PORTDはPDの出力で、PINBはPBの入力状態。
PDにPBの状態をそのまま代入したが、特定ピンを対象にコードを書きたいならDDR[A,B,D]と同じで2進表記するとわかりやすい。
で、回路の方。
PDグループのピンの出力を同じ番号のPBグループピンの入力状態に対応させるプログラムなわけだが、
マイコンのピン配列的にやりやすそうに見えた4番ピンだけを使うようにした。
まず、PD4にLEDを繋いで、電流制限のために300Ωの抵抗を入れた。
PD4に対応するPB4に電圧をかけるわけだが、PB4と電源との間にON/OFFできるスイッチとしてジャンパを入れた。
そして、PB4は大きい抵抗を挟んでGNDに繋いだ。
PB4をGNDに繋がない場合、スイッチONなら電源電圧がかかるので入力状態がhighだが、スイッチOFFで電源と断線している時にどことも繋がっていないので電位が不明。
スイッチOFF時に確実にlow(0V)にするためにPB4はGNDと繋ぐ。
PB4とGNDを直結してしまうとスイッチON時に電源からGNDにショートしてしまい大電流が流れてしまうので、スイッチとなるジャンパとGNDの間に大きい抵抗を入れる。
この時の抵抗がプルダウン抵抗という。
コードと回路が出来上がったわけだが、avr-gccでコンパイル。
$ avr-gcc -mmcu=attiny2313 -Os -c main.c
main.oが出力される。-mmcuオプションでターゲットマイコンの種別を指定する。
-cオプションでコンパイルされる。
-Oオプションで最適化ができるのだが、-Osだとサイズが小さくなるように最適化される。
-Osつけた場合とつけなかった場合で、今回のコードだけでも.hexファイルに140byteと50byteくらいの違いが出る。
gccの出力したmain.oを、avr-objcopyコマンドでavrdudeで書き込めるihex形式に変換する。
$ avr-objcopy -I elf32-avr -O ihex main.o main.hex
-Iオプションで入力ファイル形式。-Oオプションで出力ファイル形式。
オプションに続けて入力ファイルと出力ファイル名。
gccの出力したmain.oはelf32-avrという形式らしい。
avrdudeコマンドでマイコンのflash領域に書き込み。
$ sudo avrdude -c usbasp -p t2313 -U flash:w:main.hex -B 10
AVRプログラマはUSBasp化した中華のやつだが、-Bオプションをつけて速度を落とさないとエラーとなった。-Bの値は大きい方が遅いぽい。
<実験>
OFF状態
回路図記載のPB4とPD4以外に、PA2,PB5,PB6,PB7に線が繋がってるが、USBaspと繋いだままなので。
VCC(5V)とGND(0V)もUSBaspと繋いだままで、そこからマイコンに給電。
赤いケーブルが1個抜けてるが、これがジャンパでスイッチOFF状態。
ジャンパをPB4につないだらPD4に繋いだLEDが光った!
というわけで実験成功。
こんなLED光らせるだけのプログラムでは全く実用性がないが、
USB接続のPC用デバイスを自作したり、PCから制御できる特殊デバイスを作る技術を得るために、
クリスタルが届いたらV-USB系の実験をやろうと思ってる。
あと、USBの通信は不要で実用的なものとして、USB電源でのニッケル水素充電と、
先日届いたステップアップDCコンバータでニッケル水素電源での5V(USB)出力の制作を考えてる。